beaglebone black GPIO-IN GPIO-OUT PWM AIN TIMERとかのテストコード
beaglebone blackのテストコード作ったので、記念カキコ。
bbtest.c とかと保存して、 gcc bbtest.c -o bbtest とかでコンパイルしてください。
使い方は、usage 見てね。
/* BBTEST Beaglebone Black GPIO-IN GPIO-OUT PWM AIN テストプログラム. 高精度タイマー DMTIMERもおまけ AIN PWM関係は、Adafruit_BBIOとかを参考にしています。 ご自由に。 */ #include <stdio.h> #include <sys/stat.h> #include <sys/types.h> #include <sys/mman.h> #include <stdlib.h> #include <errno.h> #include <string.h> #include <fcntl.h> #include <time.h> #include <dirent.h> #include <unistd.h> #include <math.h> typedef int BEAGLEBONE_GPIO_ENUM; #define BEAGLEBONE_GPIO_IN 1 #define BEAGLEBONE_GPIO_OUT 0 int g_gpio_mem_fd = -1; volatile unsigned long* g_gpio_mem_map = (unsigned long*)MAP_FAILED; #define MMAP_OFFSET 0x44c00000 #define MMAP_SIZE (0x48ffffff - MMAP_OFFSET) #define GPIO0_MEM (0x44e07000 - MMAP_OFFSET) #define GPIO1_MEM (0x4804c000 - MMAP_OFFSET) #define GPIO2_MEM (0x481ac000 - MMAP_OFFSET) #define GPIO3_MEM (0x481ae000 - MMAP_OFFSET) #define DMTIMER0_MEM (0x44E05000 - MMAP_OFFSET) #define DMTIMER2_MEM (0x48040000 - MMAP_OFFSET) #define DMTIMER3_MEM (0x48042000 - MMAP_OFFSET) #define DMTIMER4_MEM (0x48044000 - MMAP_OFFSET) #define DMTIMER5_MEM (0x48046000 - MMAP_OFFSET) #define DMTIMER6_MEM (0x48048000 - MMAP_OFFSET) #define DMTIMER7_MEM (0x4804A000 - MMAP_OFFSET) #define GPIO_OE 0x134 #define GPIO_DATAIN 0x138 #define GPIO_DATAOUT 0x13c #define GPIO_CLEARDATAOUT 0x190 #define GPIO_SETDATAOUT 0x194 #define ARRAY_COUNTOF(arr) (sizeof(arr)/sizeof(arr[0])) #define GPIO_MEMORY_TO(gpioNo) (( (gpioNo) / 32) == 0 ? GPIO0_MEM : (( (gpioNo) / 32) == 1 ? GPIO1_MEM : (( (gpioNo) / 32) == 2 ? GPIO2_MEM : GPIO3_MEM ) ) ) #define GPIO_BIT_TO(gpioNo) (1 << (gpioNo)%32) //inとoutを両方作る #define GPIO_INDEX_TO(gpioNo) (gpioNo),(GPIO_MEMORY_TO(gpioNo)+GPIO_OE)/4,(GPIO_MEMORY_TO(gpioNo)+GPIO_DATAIN)/4,(GPIO_MEMORY_TO(gpioNo)+GPIO_DATAOUT)/4,GPIO_BIT_TO(gpioNo),~GPIO_BIT_TO(gpioNo) struct GPIOPIN{ const char* portname; const char* auxname; int gpioindex; unsigned long addressINIT; unsigned long addressIN; unsigned long addressOUT; unsigned bitmask; unsigned bitNOTmask; } ; const struct GPIOPIN GPIO_PINS[] = { //portname auxname gpioindex/addressIN/addressOUT/bitmask / bitNOTmask {"P8_3", "gpmc_ad6", GPIO_INDEX_TO(38) } ,{"P8_4", "gpmc_ad7", GPIO_INDEX_TO(39) } ,{"P8_5", "gpmc_ad2", GPIO_INDEX_TO(34) } ,{"P8_6", "gpmc_ad3", GPIO_INDEX_TO(35) } ,{"P8_7", "gpmc_advn_ale", GPIO_INDEX_TO(66) } //TIMER4 ,{"P8_8", "gpmc_oen_ren", GPIO_INDEX_TO(67) } //TIMER7 ,{"P8_9", "gpmc_ben0_cle", GPIO_INDEX_TO(69) } //TIMER5 ,{"P8_10", "gpmc_wen", GPIO_INDEX_TO(68) } //TIMER6 ,{"P8_11", "gpmc_ad13", GPIO_INDEX_TO(45) } //GPIO1_13 ,{"P8_12", "gpmc_ad12", GPIO_INDEX_TO(44) } //GPIO1_12 ,{"P8_13", "gpmc_ad9", GPIO_INDEX_TO(23) } //EHRPWM2B ,{"P8_14", "gpmc_ad10", GPIO_INDEX_TO(26) } //GPIO0_26 ,{"P8_15", "gpmc_ad15", GPIO_INDEX_TO(47) } //GPIO1_15 ,{"P8_16", "gpmc_ad14", GPIO_INDEX_TO(46) } //GPIO1_14 ,{"P8_17", "gpmc_ad11", GPIO_INDEX_TO(27) } //GPIO0_27 ,{"P8_18", "gpmc_clk", GPIO_INDEX_TO(65) } //GPIO2_1 ,{"P8_19", "gpmc_ad8", GPIO_INDEX_TO(22) } //EHRPWM2A ,{"P8_20", "gpmc_csn2", GPIO_INDEX_TO(63) } //GPIO1_31 ,{"P8_21", "gpmc_csn1", GPIO_INDEX_TO(62) } //GPIO1_30 ,{"P8_22", "gpmc_ad5", GPIO_INDEX_TO(37) } //GPIO1_5 ,{"P8_23", "gpmc_ad4", GPIO_INDEX_TO(36) } //GPIO1_4 ,{"P8_24", "gpmc_ad1", GPIO_INDEX_TO(33) } //GPIO1_1 ,{"P8_25", "gpmc_ad0", GPIO_INDEX_TO(32) } //GPIO1_0 ,{"P8_26", "gpmc_csn0", GPIO_INDEX_TO(61) } //GPIO1_29 ,{"P8_27", "lcd_vsync", GPIO_INDEX_TO(86) } //GPIO2_22 ,{"P8_28", "lcd_pclk", GPIO_INDEX_TO(88) } //GPIO2_22 ,{"P8_29", "lcd_hsync", GPIO_INDEX_TO(87) } //GPIO2_23 ,{"P8_30", "lcd_ac_bias_en", GPIO_INDEX_TO(89) } //GPIO2_25 ,{"P8_31", "lcd_data14", GPIO_INDEX_TO(10) } //UART5_CTSN ,{"P8_32", "lcd_data15", GPIO_INDEX_TO(11) } //UART5_RTSN ,{"P8_33", "lcd_data13", GPIO_INDEX_TO(9) } //UART4_RTSN ,{"P8_34", "lcd_data11", GPIO_INDEX_TO(81) } //UART3_RTSN ,{"P8_35", "lcd_data12", GPIO_INDEX_TO(8) } //UART4_CTSN ,{"P8_36", "lcd_data10", GPIO_INDEX_TO(80) } //UART3_CTSN ,{"P8_37", "lcd_data8", GPIO_INDEX_TO(78) } //UART5_TXD ,{"P8_38", "lcd_data9", GPIO_INDEX_TO(79) } //UART5_RXD ,{"P8_39", "lcd_data6", GPIO_INDEX_TO(76) } //GPIO2_12 ,{"P8_40", "lcd_data7", GPIO_INDEX_TO(77) } //GPIO2_13 ,{"P8_41", "lcd_data4", GPIO_INDEX_TO(74) } //GPIO2_10 ,{"P8_42", "lcd_data5", GPIO_INDEX_TO(75) } //GPIO2_11 ,{"P8_43", "lcd_data2", GPIO_INDEX_TO(72) } //GPIO2_8 ,{"P8_44", "lcd_data3", GPIO_INDEX_TO(73) } //GPIO2_9 ,{"P8_45", "lcd_data0", GPIO_INDEX_TO(70) } //GPIO2_6 ,{"P8_46", "lcd_data1", GPIO_INDEX_TO(71) } //GPIO2_7 ,{"P9_11", "gpmc_wait0", GPIO_INDEX_TO(30) } //P9_11 ,{"P9_12", "gpmc_ben1", GPIO_INDEX_TO(60) } //GPIO1_28 ,{"P9_13", "gpmc_wpn", GPIO_INDEX_TO(31) } //UART4_TXD ,{"P9_14", "gpmc_a2", GPIO_INDEX_TO(50) } //EHRPWM1A ,{"P9_15", "mii1_rxd3", GPIO_INDEX_TO(48) } //GPIO1_16 ,{"P9_16", "gpmc_a3", GPIO_INDEX_TO(51) } //EHRPWM1B ,{"P9_17", "spi0_cs0", GPIO_INDEX_TO(5) } //I2C1_SCL ,{"P9_18", "spi0_d1", GPIO_INDEX_TO(4) } //I2C1_SDA ,{"P9_19", "uart1_rtsn", GPIO_INDEX_TO(13) } //I2C2_SCL ,{"P9_20", "uart1_ctsn", GPIO_INDEX_TO(12) } //I2C2_SDA ,{"P9_21", "spi0_d0", GPIO_INDEX_TO(3) } //UART2_TXD ,{"P9_22", "spi0_sclk", GPIO_INDEX_TO(2) } //spi0_sclk ,{"P9_23", "gpmc_a1", GPIO_INDEX_TO(49) } //GPIO1_17 ,{"P9_24", "uart1_txd", GPIO_INDEX_TO(15) } //GPIO1_18 ,{"P9_25", "mcasp0_ahclkx", GPIO_INDEX_TO(117)} //GPIO3_21 ,{"P9_26", "uart1_rxd", GPIO_INDEX_TO(14) } //UART1_RXD ,{"P9_27", "mcasp0_fsr", GPIO_INDEX_TO(115)} //GPIO3_19 ,{"P9_28", "mcasp0_ahclkr", GPIO_INDEX_TO(113)} //SPI1_CS0 ,{"P9_29", "mcasp0_fsx", GPIO_INDEX_TO(111)} //SPI1_D0 ,{"P9_30", "mcasp0_axr0", GPIO_INDEX_TO(112)} //SPI1_D1 ,{"P9_31", "mcasp0_aclkx", GPIO_INDEX_TO(110)} //SPI1_SCLK ,{"P9_41", "xdma_event_intr1", GPIO_INDEX_TO(20) } //CLKOUT2 ,{"P9_42", "ecap0_in_pwm0_out",GPIO_INDEX_TO(7) } //GPIO0_7 ,{"USR0", "gpmc_a5", GPIO_INDEX_TO(53) } //USR0 ,{"USR1", "gpmc_a6", GPIO_INDEX_TO(54) } //USR1 ,{"USR2", "gpmc_a7", GPIO_INDEX_TO(55) } //USR2 ,{"USR3", "gpmc_a8", GPIO_INDEX_TO(56) } //USR3 }; int isExist(const char* filename) { struct stat st; return stat(filename ,&st) == 0; } void echoWrite(const char* value , const char* filename) { FILE *pin; if ( (pin = fopen(filename,"w")) != NULL) { fwrite(value , sizeof(char) , strlen(value) , pin); fclose(pin); printf("filename:%s value:%s\n",filename,value); return; } printf("failed to filename:%s\n",filename); return; } void echoWriteInt(int value , const char* filename) { FILE *pin; if ( (pin = fopen(filename,"w")) != NULL) { fprintf(pin,"%d",value); fclose(pin); printf("filename:%s value:%d\n",filename,value); return; } printf("failed to filename:%s\n",filename); return; } int beaglebone_findpath(const char* basepath,const char* findPrefix,char* retPath,unsigned int len) { DIR* handle = opendir(basepath); if (!handle) { return 0; } struct dirent* ent; while(ent = readdir(handle)) { if ( strstr(ent->d_name,findPrefix) ) { snprintf(retPath,len,"%s/%s",basepath,ent->d_name); closedir(handle); return 1; } } closedir(handle); return 0; } int beaglebone_slot_install(const char* name) { char bone_capemgr[50]; char slot[50]; if (! beaglebone_findpath("/sys/devices", "bone_capemgr",bone_capemgr,sizeof(bone_capemgr)) ) { printf("can not found /sys/devices/bone_capemgr* directory.\n"); return 0; } snprintf(slot,sizeof(slot),"%s/slots",bone_capemgr); //既にスロットに追加されているか? char line[256]; FILE * fp = fopen(slot,"r+"); if (!fp) { printf("can not open %s\n",slot); return 0; } while( fgets(line,sizeof(line),fp) ) { if (strstr(line,name) ) { fclose(fp); //既に追加されている return 10; } } fclose(fp); //追加する. fp = fopen(slot,"r+"); if (!fp) { printf("can not open %s\n",slot); return 0; } fprintf(fp,"%s",name); fclose(fp); printf("install slot %s !\n",name); return 1; } int beaglebone_slot_uninstall(const char* name) { char bone_capemgr[50]; char slot[50]; if (! beaglebone_findpath("/sys/devices", "bone_capemgr",bone_capemgr,sizeof(bone_capemgr)) ) { printf("can not found /sys/devices/bone_capemgr* directory.\n"); return 0; } snprintf(slot,sizeof(slot),"%s/slots",bone_capemgr); char line[256]; FILE * fp = fopen(slot,"r+"); if (!fp) { printf("can not open %s\n",slot); return 0; } while( fgets(line,sizeof(line),fp) ) { if (strstr(line,name) ) { //parse number char * numerStart = line; printf("line %s\n",line); for( ; *numerStart ; numerStart++) { if (*numerStart != ' ') break; } char * numerEnd = numerStart; for( ; *numerEnd ; numerEnd++) { if (*numerEnd == ':') break; } if (numerStart == numerEnd || *numerStart == '\0' || *numerEnd == '\0') { printf("can not parse line: %s\n",line); fclose(fp); return 0; } // printf("line parse atoi %d\n",atoi(line)); *numerEnd = '\0'; // printf("line parse atoi %s\n",numerStart); fprintf(fp, "-%s", numerStart); fclose(fp); return 1; } } fclose(fp); return 1; } int beaglebone_slot_check(const char* name) { char bone_capemgr[50]; char slot[50]; if (! beaglebone_findpath("/sys/devices", "bone_capemgr",bone_capemgr,sizeof(bone_capemgr)) ) { printf("can not found /sys/devices/bone_capemgr* directory.\n"); return 0; } snprintf(slot,sizeof(slot),"%s/slots",bone_capemgr); char line[256]; FILE * fp = fopen(slot,"r+"); if (!fp) { printf("can not open %s\n",slot); return 0; } while( fgets(line,sizeof(line),fp) ) { if (strstr(line,name) ) { fclose(fp); return 1; } } fclose(fp); return 0; } void beaglebone_clean() { if (g_gpio_mem_fd < 0) { return ; } close(g_gpio_mem_fd); } //beagleboneを初期化します int beaglebone_init() { beaglebone_clean(); g_gpio_mem_fd = open("/dev/mem", O_RDWR | O_SYNC); if (g_gpio_mem_fd < 0) { printf("Could not open GPIO memory fd\n"); return -1; } g_gpio_mem_map = ( unsigned long*) mmap(NULL, MMAP_SIZE, PROT_READ | PROT_WRITE,MAP_SHARED, g_gpio_mem_fd, MMAP_OFFSET); if (g_gpio_mem_map == MAP_FAILED) { printf ("GPIO Mapping failed\n"); close(g_gpio_mem_fd); return -2; } return 1; } const struct GPIOPIN* beaglebone_gpio_init_for_rawindex(int rawindex,BEAGLEBONE_GPIO_ENUM isIO) { char filename[128]; const struct GPIOPIN* gpiodef = &GPIO_PINS[rawindex]; ///BBBでは不要らしい. // sprintf(filename,"/sys/kernel/debug/omap_mux/%s",gpiodef->auxname); // echoWrite(isIO ? "37" : "7",filename ); sprintf(filename,"/sys/class/gpio/export"); echoWriteInt(gpiodef->gpioindex,filename ); sprintf(filename,"/sys/class/gpio/gpio%d/direction" , gpiodef->gpioindex); echoWrite(isIO ? "in" : "out",filename ); return gpiodef; } const struct GPIOPIN* beaglebone_gpio_init_for_name(const char* name,BEAGLEBONE_GPIO_ENUM isIO) { int i; for(i = 0 ; i < ARRAY_COUNTOF(GPIO_PINS) ; i++ ) { if (strcmp(GPIO_PINS[i].portname,name) == 0 ) { printf(" %s --> %d\n",name,i); return beaglebone_gpio_init_for_rawindex(i,isIO); } } printf("%s not FOUND!",name); return NULL; } void beaglebone_gpio_clean(const struct GPIOPIN* gpiodef) { if (gpiodef == NULL) return ; // char filename[128]; // sprintf(filename,"/sys/class/gpio/unexport"); // echoWriteInt( gpiodef->gpioindex,filename ); } inline int beaglebone_gpio_read(const struct GPIOPIN* gpiodef) { return (g_gpio_mem_map[gpiodef->addressIN] & gpiodef->bitmask) ; } inline void beaglebone_gpio_write_on(const struct GPIOPIN* gpiodef) { g_gpio_mem_map[gpiodef->addressOUT] |= gpiodef->bitmask; } inline void beaglebone_gpio_write_off(const struct GPIOPIN* gpiodef) { g_gpio_mem_map[gpiodef->addressOUT] &= gpiodef->bitNOTmask; } inline void beaglebone_gpio_write(const struct GPIOPIN* gpiodef,int value) { if (value) { beaglebone_gpio_write_on(gpiodef); } else { beaglebone_gpio_write_off(gpiodef); } } //高精度の時刻を取得. inline unsigned long beaglebone_dmtimer_get() { // return g_gpio_mem_map[(DMTIMER2_MEM + 0x3c) / 4] &0x3FFFF; //有効桁が 18bitらしい. return g_gpio_mem_map[(DMTIMER2_MEM + 0x3c) / 4] ;//そんなことはない? } struct AINPIN{ const char* portname; const char* AINname; char filename[50]; //面倒だからメモリで. } ; struct AINPIN AIN_PINS[] = { {"P9_39","AIN0",""} ,{"P9_40","AIN1",""} ,{"P9_41","AIN2",""} ,{"P9_42","AIN3",""} ,{"P9_43","AIN4",""} ,{"P9_44","AIN5",""} ,{"P9_45","AIN6",""} }; const struct AINPIN* beaglebone_AIN_init_for_rawindex(int rawindex) { //diect IOのやり方がわからないので、ファイルで代用.悔しい. char ocp_path[50]; char helper_path[50]; char AIN_filename[50]; struct AINPIN* AINpin; //まず有効にする. if (!beaglebone_slot_install("cape-bone-iio")) { printf("can not install cape-bone-iio.\n"); return NULL; } AINpin = &AIN_PINS[rawindex]; if ( AINpin->filename[0] != '\0' ) {//既に初期化済み return AINpin; } if (! beaglebone_findpath("/sys/devices", "ocp",ocp_path,sizeof(ocp_path)) ) { printf("can not found /sys/devices/ocp* directory.\n"); return NULL; } //デバイスファイルを探す. unsigned int retry = 0; AIN_filename[0] = '\0'; for(retry = 0 ; retry < 1000 ; retry++ ) { if ( beaglebone_findpath(ocp_path, "helper",helper_path,sizeof(helper_path)) ) { snprintf(AIN_filename,sizeof(AIN_filename),"%s/%s",helper_path,AINpin->AINname); if ( isExist(AIN_filename) ) { break; } } usleep(1000); //1msec sleep... } if (retry>=1000) { printf("can not found %s directory.\n",AIN_filename); return NULL; } strcpy(AINpin->filename,AIN_filename); return AINpin; } const struct AINPIN* beaglebone_AIN_init_for_name(const char* name) { int i; for(i = 0 ; i < ARRAY_COUNTOF(AIN_PINS) ; i++ ) { if (strcmp(AIN_PINS[i].portname,name) == 0 ) { printf(" %s --> %d\n",name,i); return beaglebone_AIN_init_for_rawindex(i); } if (strcmp(AIN_PINS[i].AINname,name) == 0 ) { printf(" %s --> %d\n",name,i); return beaglebone_AIN_init_for_rawindex(i); } } return NULL; } void beaglebone_AIN_clean(const struct AINPIN* AINpin) { } float beaglebone_AIN_to_Volts(unsigned int value) { return value * (1.8f / 4096 ); } int beaglebone_AIN_read(const struct AINPIN* AINpin) { int fd = open(AINpin->filename,O_RDONLY); if (fd<0) { printf("can not open %s errno:%d\n",AINpin->filename,errno ); return 0; } char buf[10]; read(fd,buf,sizeof(buf)); close(fd); return atoi(buf); } struct PWM{ int fd_period; int fd_duty; int fd_run; char* slotname; }; unsigned int g_pwm_init_count=0; struct PWM* beaglebone_pwm_init(const char* portname) { if (!beaglebone_slot_install("am33xx_pwm")) { printf("can not install am33xx_pwm.\n"); return NULL; } char pwmname[50]; snprintf(pwmname,sizeof(pwmname),"bone_pwm_%s",portname); if (!beaglebone_slot_install(pwmname)) { printf("can not install %s.\n",pwmname); return NULL; } char ocp[50]; if (! beaglebone_findpath("/sys/devices", "ocp",ocp,sizeof(ocp)) ) { printf("can not found /sys/devices/bone_capemgr* directory.\n"); return NULL; } char pwm_dir[50]; char pwm_filename[50]; snprintf(pwmname,sizeof(pwmname),"pwm_test_%s",portname); unsigned int retry = 0; for(retry = 0 ; retry < 1000 ; retry++ ) { if ( beaglebone_findpath(ocp,pwmname,pwm_dir,sizeof(pwm_dir)) ) { snprintf(pwm_filename,sizeof(pwm_filename),"%s/run",pwm_dir); if ( isExist(pwm_filename) ) { break; } } usleep(1000); //1msec sleep... } if (retry>=1000) { printf("can not found %s/%s directory.\n",ocp,pwmname); return NULL; } struct PWM* pwmst = (struct PWM*)malloc(sizeof(struct PWM)); pwmst->slotname = strdup(pwmname); snprintf(pwm_filename,sizeof(pwm_filename),"%s/run",pwm_dir); pwmst->fd_run = open(pwm_filename,O_RDWR); if (pwmst->fd_run<0) { printf("can not open %s errno:%d\n",pwm_filename,errno ); close(pwmst->fd_period); close(pwmst->fd_duty); free(pwmst); return NULL; } write(pwmst->fd_run,"0",1); snprintf(pwm_filename,sizeof(pwm_filename),"%s/period",pwm_dir); pwmst->fd_period = open(pwm_filename,O_RDWR); if (pwmst->fd_period<0) { printf("can not open %s errno:%d\n",pwm_filename,errno ); free(pwmst); return NULL; } snprintf(pwm_filename,sizeof(pwm_filename),"%s/duty",pwm_dir); pwmst->fd_duty = open(pwm_filename,O_RDWR); if (pwmst->fd_duty<0) { printf("can not open %s errno:%d\n",pwm_filename,errno ); close(pwmst->fd_period); free(pwmst); return NULL; } g_pwm_init_count++; return pwmst; } void beaglebone_pwm_clean(struct PWM* pwmst) { close(pwmst->fd_period); close(pwmst->fd_duty); close(pwmst->fd_run); // beaglebone_slot_uninstall(pwmst->slotname); //消さない方がいいのもね free(pwmst->slotname); free(pwmst); g_pwm_init_count--; if (g_pwm_init_count <= 0) { // beaglebone_slot_uninstall("am33xx_pwm"); } } inline void beaglebone_pwm_setall(struct PWM* pwmst,unsigned int period,unsigned int duty,int on) { char buf[20]; int len; len = snprintf(buf,sizeof(buf),"%u",duty); if ( write(pwmst->fd_duty,buf,len) < 0 ) { printf("can not write duty %u errno:%d",duty,errno); return ; } len = snprintf(buf,sizeof(buf),"%u",period); if ( write(pwmst->fd_period,buf,len) < 0 ) { printf("can not write period %u errno:%d",period,errno); return ; } if (on) { write(pwmst->fd_run,"1",1); } else { write(pwmst->fd_run,"0",1); } } inline void beaglebone_pwm_duty(struct PWM* pwmst,float persent) { if (persent <= 0) persent = 0; if (persent >= 100) persent = 100; float duty = 500000 * (persent / 100); beaglebone_pwm_setall(pwmst,500000,(unsigned int)duty,1); } inline void beaglebone_pwm_on(struct PWM* pwmst) { write(pwmst->fd_run,"1",1); } inline void beaglebone_pwm_off(struct PWM* pwmst) { write(pwmst->fd_run,"0",1); } void usage() { puts(""); puts("bbtest Bealgebone black test"); puts("-------------------------------------------------------------------------------"); puts(" bbtest gpio_out P8_12 1 (write GPIO P8_12 port by 1)"); puts(" bbtest gpio_out P8_12 0 (write GPIO P8_12 port by 0)"); puts(""); puts(" bbtest gpio_in P8_12 (read GPIO P8_12 port)"); puts(""); puts(" bbtest ain AIN0 (read AIN0(P9_39) )"); puts(" bbtest ain P9_39 (read AIN0(P9_39) )"); puts(""); puts(" bbtest pwm P8_13 10000 5000 1 (period:10000 duty:5000 onoff:1)"); puts(" bbtest pwm P8_13 10000 2000 0 (period:10000 duty:2000 onoff:0)"); puts(""); puts(" bbtest timer"); puts(""); } int mainbbtest(int argc, const char * argv[]) { if (strcmp(argv[1],"gpio_out") == 0) {//おまけ. gpio のテスト if (argc <= 3) { printf("GPIO PIN. bbtest gpio_out P8_12 1 or bbtest gpio_out P8_12 0 \n"); return -1; } const struct GPIOPIN* gpio = beaglebone_gpio_init_for_name(argv[2],BEAGLEBONE_GPIO_OUT); if (!gpio) { printf("can not open GPIO PORT:%s\n",argv[2]); return -2; } if ( atoi(argv[3]) ) { beaglebone_gpio_write_on(gpio); } else { beaglebone_gpio_write_off(gpio); } beaglebone_gpio_clean(gpio); return 1; } else if (strcmp(argv[1],"gpio_in") == 0) {//おまけ. gpio INのテスト if (argc <= 2) { printf("GPIO PIN. bbtest gpio_in P8_12 \n"); return -1; } const struct GPIOPIN* gpio = beaglebone_gpio_init_for_name(argv[2],BEAGLEBONE_GPIO_IN); if (!gpio) { printf("can not open GPIO PORT:%s\n",argv[2]); return -2; } int r = (int) beaglebone_gpio_read(gpio); printf("gpio read r:%d\n",r); beaglebone_gpio_clean(gpio); return 1; } else if (strcmp(argv[1],"ain") == 0) {//おまけ. AINのテスト if (argc <= 2) { printf("AIN PIN. bbtest ain AIN0 or bbtest ain P9_39 \n"); return -1; } const struct AINPIN* ain = beaglebone_AIN_init_for_name(argv[2]); if (!ain) { printf("can not open AIN PORT:%s\n",argv[2]); return -2; } int r = beaglebone_AIN_read(ain); printf("AIN read r:%d\n",r); beaglebone_AIN_clean(ain); return 1; } else if (strcmp(argv[1],"pwm") == 0) {//おまけ. PWMのテスト if (argc <= 5) { printf("pwm PIN period duty onoff. bbtest pwm P8_13 10000 5000 1 (period:10000 duty:5000 onoff:1) \n"); return -1; } struct PWM* pwm = beaglebone_pwm_init(argv[2]); if (!pwm) { printf("can not open PWM PORT:%s\n",argv[2]); return -2; } beaglebone_pwm_setall(pwm,atoi(argv[3]) ,atoi(argv[4]),atoi(argv[5]) ); beaglebone_pwm_clean(pwm); return 1; } else if (strcmp(argv[1],"timer") == 0) {//おまけ.タイマーのテスト. puts("TIMER TEST. plases wait."); volatile unsigned int sec1 = beaglebone_dmtimer_get(); sleep(1); volatile unsigned int sec2 = beaglebone_dmtimer_get(); volatile unsigned int msec1 = beaglebone_dmtimer_get(); usleep(1000); volatile unsigned int msec2 = beaglebone_dmtimer_get(); volatile unsigned int usec1 = beaglebone_dmtimer_get(); usleep(1); volatile unsigned int usec2 = beaglebone_dmtimer_get(); printf("before:%u --> [sleep(1)] --> after:%u after - before = %u\n",sec1,sec2,sec2-sec1); printf("before:%u --> [usleep(1000)] --> after:%u after - before = %u\n",msec1,msec2,msec2-msec1); printf("before:%u --> [usleep(1)] --> after:%u after - before = %u\n",usec1,usec2,usec2-usec1); return 1; } return -1; } int main(int argc, const char * argv[]) { if (argc <= 1) { usage(); return -1; } int r; r = beaglebone_init(); if (r <= 0) { printf("beaglebone_init ERROR! r:%d\n",r); usage(); return -1; } r = mainbbtest(argc,argv); if (r <= 0) { printf("mainbbtest ERROR! r:%d\n",r); usage(); beaglebone_clean(); return -1; } beaglebone_clean(); }
usage
bbtest Bealgebone black test ------------------------------------------------------------------------------- bbtest gpio_out P8_12 1 (write GPIO P8_12 port by 1) bbtest gpio_out P8_12 0 (write GPIO P8_12 port by 0) bbtest gpio_in P8_12 (read GPIO P8_12 port) bbtest ain AIN0 (read AIN0(P9_39) ) bbtest ain P9_39 (read AIN0(P9_39) ) bbtest pwm P8_13 10000 5000 1 (period:10000 duty:5000 onoff:1) bbtest pwm P8_13 10000 2000 0 (period:10000 duty:2000 onoff:0) bbtest timer
ピン(beagleboneの時の画像をそのまま)
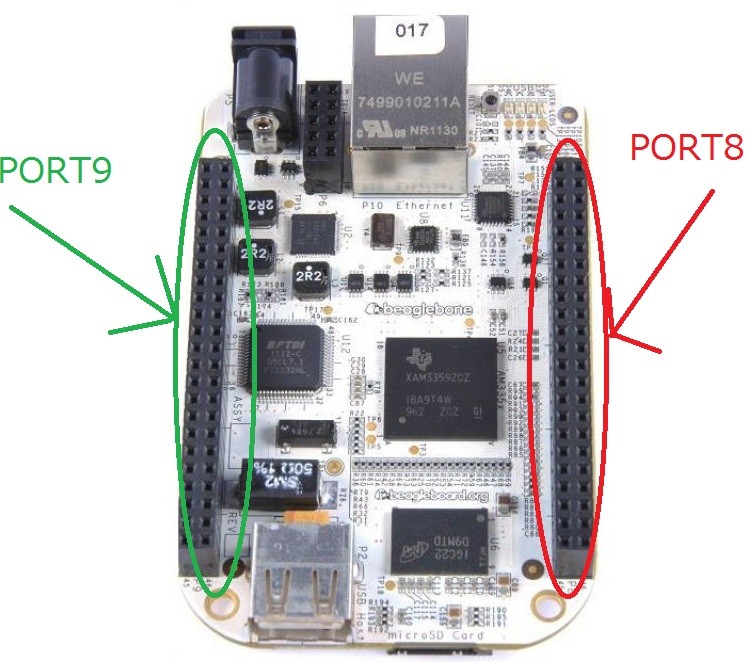
LANケーブルをつなぐ所を上にして、
このバスを上から、pin1 pin2 〜 pin43 pin44 となっています。
pin1 pin2 は GND です。
これも昔の表から。
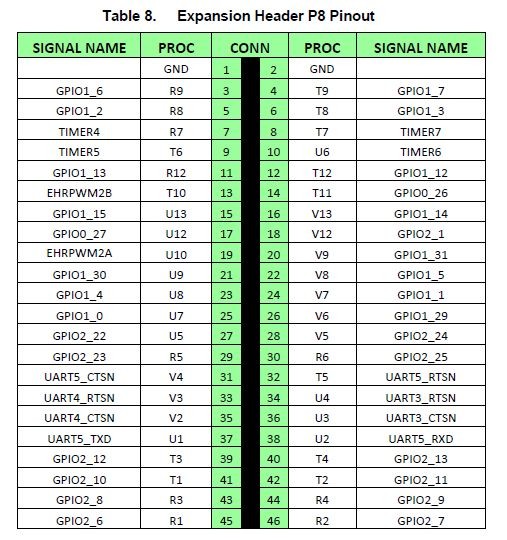
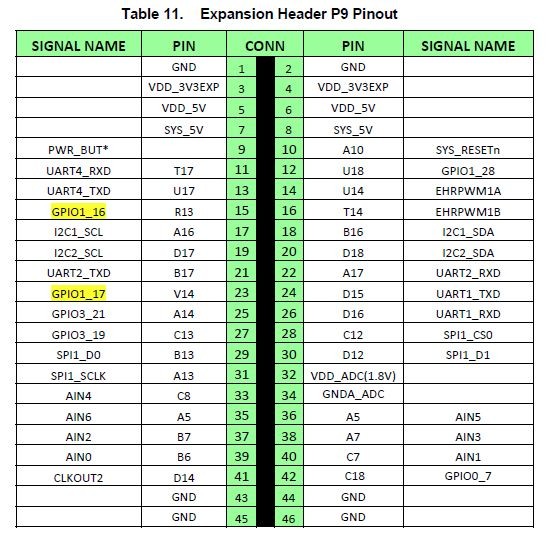
間違っていたら教えてね。